 1999, First-Grade Homework")
Author: Adam

Lenovo Yoga laptops, especially those from the “900”, “920”, “930”, and “940” series, have a design defect where their power circuitry can self-destruct. The company will not acknowledge…

It has been about 5 years since I moved to northern California in search of more opportunity than what I felt could be had in New York. It’s…


STMicro’s documentation about the subject is some of the most terse documentation I’ve ever seen in the business! This cheat sheet is a work-in-progress. DM-What? The STM32 microcontroller…

In early 2018, friends and I decided to work on something rather unorthodox from our regular activities –we set out to bring new life into an old steel…

It is a tale very commonly told that Lead Acid batteries are a “cheaper” solution than Lithium batteries for off-grid and solar storage. As of 2019 that is…

It took a great deal of failure and subsequent reflection to recognize this not-so-obvious idea. It is very fashionable in the technology industry to build products which capitalize…

An exceptional organization is forward thinking. It consistently asks, What will the world be like in five, ten, twenty years? What will be available then, which is not…

Disclaimer: Everything here might be wrong. Feel free to correct me if you believe it so. Let’s say you wanted to create a solenoid strong enough to levitate…

There has been an increase in business behavior lately known as regulatory capture, where in principle, government agencies are intentionally and carefully corrupted to further private interests. More…

The following is an excerpt from the “GE Water Purification Handbook – Boiler Water Systems”, Chapter 11. It details corrosion prevention methods of the mild steel tanks used…

Though I built this guy back in 2012, I haven’t really taken the time yet to make a post about how it works. Finally, here’s part 1 in…
220k resistor from center pin to +19V for fast mode. 1M resistor for ultra slow charging mode.

This was a short experiment in cone-beam CT reconstruction. I built a scanner from craigslist parts, which was capable of reconstructing a package of hot dogs with only…

This is a project I took from conception, to sketch, to working design in about 4 month’s time. It is the most powerful handheld x-ray source in existence….










I was challenged to make something understandable; in this case, Fields.

Recently I’ve been restoring a Ludlum Model 12 rate meter. What is that you might ask? The best ratemeter on this side of Si Valley, that’s what! I…

Every once in a while I build something ridiculous, and this would be one of those whiles. Ladies and Gentlemen of the internet, I present to you what…



I moved California. More about that on another post. Since then, I’ve (well, we’ve) had wifi problems, specifically ones emergent of what I consider to be some terrible…


Preface: Upon reading chapter four of my assigned physics textbook [Modern Physics, Krane], I grew both tired and annoyed with the generalizations, or “leaps of faith” which author…
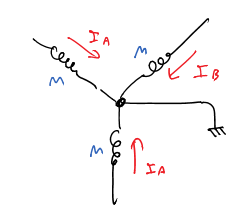
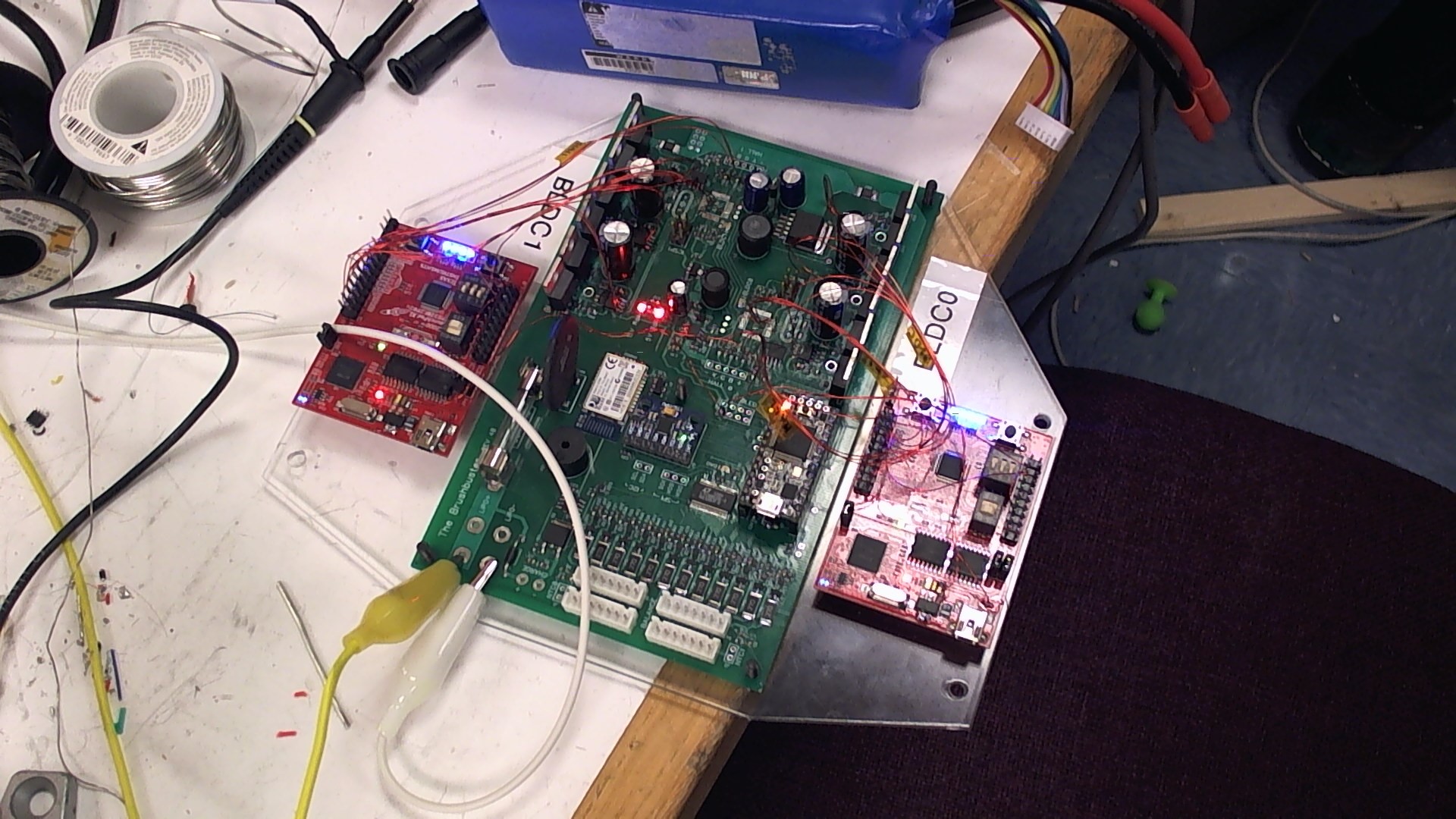
Hardware development is painfully slow. But it does consistently, albeit slowly carry on. (or at least I try to convince myself it does) Le’ Software: Motor Modeling What is a…
Now that finals are complete I once again have time to work on projects. Video glasses for James, rebuilding super-DRSSTC among others, but the most important one right…

I have a bad habit of missing voicemails. When they arrive I usually do not know about them, and for some reason verizon doesn’t warn me when my…

Tektronix sent me a new TDS2024C! Now what do we do with new $1500 toys? WE RIP THEM APART (⌐■_■)っ═一 Let’s look at her from behind. Not…

From the hours of 11 pm to 4am Saturday night I decided to make an educational video. Don’t ask me why. I wanted to do some signal processing…

In 1895, a professor by the name of Wilhelm Conrad Rontgen discovered a source of invisible rays which were capable of penetrating materials not normally translucent to ordinary light. Not…

Alpha particles are very energetic little buggers. In fact, energies of 20MeV per particle are not uncommon. While this makes them incredibly dangerous if you happen to ingest…

Here is what I can best describe as a cold war era nuclear bomb detector. Whether or not such a device is legal to own is a matter…

The 2x2A is a vacuum rectifier that, before the advent of the silicon diode, was used to rectify the high voltage needed for fun things such as television…

By far the most common radiation detector, the Geiger-Müller tube itself is nothing more than a highly modified neon lamp. Its method of operation is rather simple. The GM…

The goal of this project was to build an inexpensive portable x-ray machine, since such a device didn’t seem to exist! Odd, since such a machine could prove…

If you intend to copy my x-ray experiments, let’s be safe now, shall we? Nonionizing radiation, the stuff of microwave, infrared and visible light doesn’t have the energy…

Invented in 1913 by William D. Coolidge, the Coolidge tube is by far the most popular method used to generate x-rays. Essentially it’s just a thermionic diode, but…

Electricity is useless without a way to move it around, so in order to accomplish that task people invented the wire. A wire is nothing more than a conductor…

You don’t need lots of money to make high voltage capacitors, in fact some pretty decent ones can be made with some cheap and readily available materials. This…

Ladies and gentlemen of the world, I present to you a marvelous device that will revitalize your health and bring wondrous wealth and prosperity to your families and…

Before small cockroft walton multipliers became inexpensive, x-ray machines tended to use large iron transformers. These are the highest voltage transformers you’ll likely ever come across, with even a small…

Transformers are not the only way one can boost voltage; another method to the madness is a Cockroft-Walton multiplier, or thes the Villard Cascade depending on your favorite…

After their invention by Benjamin Franklin, Franklin’s bells became a novelty in the late 1700s. One bell would be connected to a stake in the ground while the…

Also referred to a Line Output Transformer, the flyback transformer is a high frequency, high voltage transformer most often used to power cathode ray tubes. Flybacks are capable…

A “ZVS driver” is a very simple circuit that can oscillate a large amount of power with about 90% efficiency. To the right exists a simplified version of…

My last plasma speaker, which used only one mosfet, got a bit too hot to run without a bucket of ice water nearby. To cut down on that heat I…

I’ve always wanted to make one of these, but never got around to it until recently. However, after finding the most adorable tiny flyback in a 5 inch TV, I…

Marx generators are the simplest voltage multipliers out there, as they contain nothing but capacitors, wire and resistors. Below is a schematic of a marx generator and as…

The microwave oven transformer is possibly one of the simplest methods of making some big high voltage arcs, mainly because they are robust, cheap, and easy to hook…

Way back in the 1960s, the newly invented laser was described as “a funny but useless experimental demonstration in physics”, and a “solution looking for a problem”. Today though, lasers are an integral…
Neon sign transformers are transformers used to power neon signs. Typically outputting 30mA at 4 to 15kV a neon sign transformer is a great toy to have if…

During attempts to build a cat’s whisker detector from SiC, I noticed a faint glow. Probing further, I found that one of the largest crystals emitted quite a lot of…